Objectives of our research

In the intelligent robot laboratory at the University of Tsukuba, the aim of our research is to develop new technologies for the autonomous and automatic machines (robots) that will support our daily life in real environment.
Nowadays, thanks to the progress in science and technology, many machines with high power, high speed and high precision are available. These convenient and useful machines are successively developed, and some of them are automatically controlled by computers. However, most of them have good performance only in environments that have been designed for them. By comparison, humans and animals are able to achieve various tasks in much more complicated environments. The objective of our research is to endow autonomous machines with the same capabilities, that is to say, to realize useful and reliable autonomous robot by endowing them with flexibility, adaptability, robustness and reliability in order to fulfill accurately a given task in any environment.
Since hardware and software of computer technology or the so-called IT is rapidly improving now, computer serves the part of most jobs about communication, processing and storage of information. We would like to use this "usefulness" not only in computer worlds but also in the real world. We can say that this is our research objective.
As an example to the above purpose, we are developing a mobile robot to reach the given goal location and work on the requested task in outdoor field or in indoor building environment. Our main research topic is to discover the technologies for realizing such kind of robots.
Approach : Method of research

Robotic agents differ from purely software agents, since the environment in which they are expected to operate is not just an abstraction or a virtual world, but the real world. However, the real world is far more complex for us to design a simple and general model. When we develop integration technology of robotic system and each fundamental technology, we must evaluate new functions and their limitations through real world application. When putting in practice concrete issues, problems may seem countless, but then new solutions to these problems may also come out. Therefore, it is important to repeat experiments in a real environment as much as possible for developing a robotic system. This "experiments in the real world" is our first leading methodology, and we call this approach "Robotics as an experimental science" or "Experimental Robotics".
Of course, each fundamental technology is important for useful robots working in real environments. However, it may be not possible to really know what kind of elements might be necessary only by an approach starting from fundamental technology. So, we are trying to bring out the following approach. At first, we decide the practical task the robot should realize and the environment where the robot should work. Then, we develop a real robot to realize such task, to discover the required fundamental technology through the developing process and researching on them. This is the second leading methodology of our research. We call it "Task oriented approach".
To perform our research based on these methodologies, we need robots as our experimental tools (robotic platform). As a research tool, the robotic platform is expected to be a commonly shared tool with generality. That is the reason why we are also developing and building our own mobile robot platform, and we have called it "YAMABICO".
As our task-oriented research methodology may be associated with a top-down approach, on the opposite, our aim at developing a robotic platform may be related to a bottom-up approach. The original characteristics of our research are our experimental approach to realize our final goal : "Automatic machines well-working in the real world" combining these two different methodologies.
Autonomous robots "YAMABICO" as our research platform
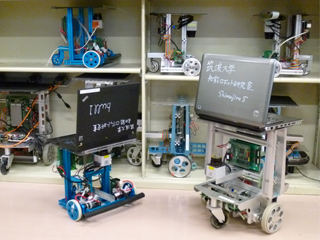
In order to utilize our robots as a platform for various research purposes, it is important to use standard technologies as possible as we can and provide extensibility of functions. We always try to keep in mind extensibility of functions, easiness of implementation and safety when developing the robot "YAMABICO" as the platform of our research. We have various types of YAMABICO robots, and the specification of the standard type is determined by the size, which is about 35 cubic cm, the weight about 15kg and two driving wheels.
Currently, we have 35 YAMABICO robots and they are being used for various researches. Since each YAMABICO robot is associated to an independent research, it has become as a result in a certain way their own personality. However, they basically have all the same mechanisms, hardware, and software components. And we try to standardize them as much as possible.
Therefore, any function of hardware and any program that have been developed for one, can basically be applied to another.
Present state of the laboratory

Now, under the supervision of 4 professors, 1 postdoctoral researchers, 5 Ph.D. program students, 32 master's program students, 8 undergraduate students, and 1 visiting researcher belong to the intelligent robot laboratory in University of Tsukuba. So that, we have a total of 51 members. Each member of the Lab has his/her own research theme. Even if each research subject seems to imply small progress, we can derive great contribution to robotics from the sum of these works.
Robotics and robotic technologies are difficult to adapt to industries. Furthermore, still we are not able to realize the "perfect robot" most people is dreaming of. However, robotics has the feature of easiness for defining goals and evaluating results. Therefore, the study of robotics at University is a very good way for students to learn technical skills and exercise themselves to research. We think that students graduated from our laboratory all have developed strength in research work and possess valuable technical skills.
History
In 1976, Prof. Yutaka Kanayama (Later, he was a Professor at Naval Postgraduate School, USA) started a project to develop mobile robots with Dr. Jun'ichi Iijima, Research associate at Department of Computer Science in Electro Communication University. In 1977, Prof. Kanayama moved to Institute of Electronics and Information Science in University of Tsukuba, and the project had been named the "YAMABICO project".In 1978, Dr. Shin'ichi Yuta, Lecturer (currently a visiting researcher at this lab) joined this project. After Prof. Kanayama had gone to USA in 1984, Prof. Yuta inherited this project. In 1992, Dr. Akihisa Ohya, research associate (currently Professor) joined the project. Also in 1994, Dr. Takashi Tsubouchi, Lecturer (who got Ph.D. degree in this laboratory in 1988, currently Professor) joined the project. In 2012, Prof. Yuta retired as a professor from the university (currently staying as a visiting researcher).