Research Movies 2000
Robot with a small-sized manipulator - No. 1, navigation, seizure and transportation

none
Robot with a small-sized manipulator - No. 2, Tracking control
none
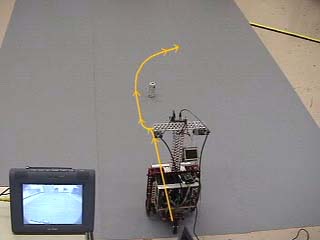
Robot with a small-sized manipulator - No. 3, navigation, seizure and transportation
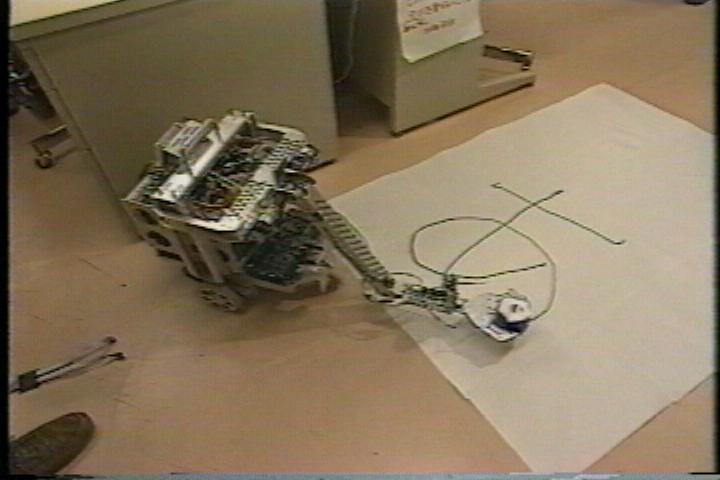
Demo of the mobile manipulator "Daina". Navigation using ultrasonic sensor. Recognition of the can using a camera. Take the can using the manipulator and bring it to a chosen place.
Robot with a small-sized manipulator - No. 4, piling up objects

Demo of cube piling up.
A first-stage experiment on long term activity of autonomous mobile robot - Repetitive base-docking task
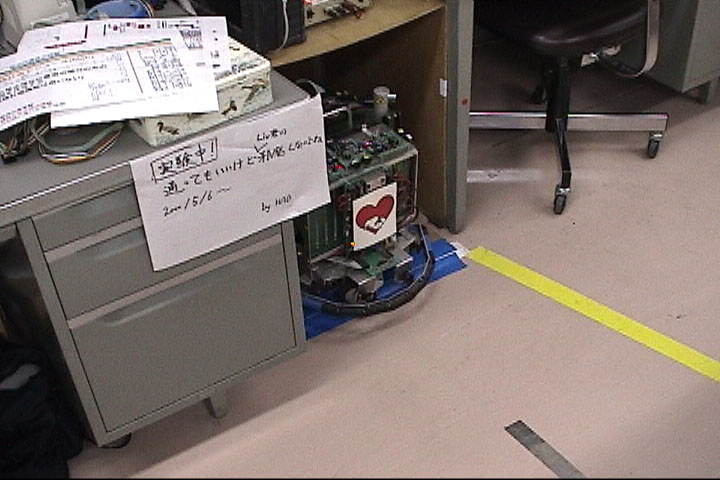
From 2000, May 8, During the 10 days of the experiment, the Yamabico "Liv" kept on returning to base and parking to fill its batteries, in spite of external disturbances. In one week, "Liv"parked 1080 times and ran 3391 m.
In this movie, we can see 4 experiments:
- The normal case: get out of the base and get back
- The same for another angle
- Tried the same experiment while concealing the tape on floor used for navigation
- Confrontation with an obstacle
Bicycle robot experiment

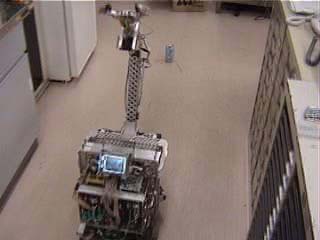
Control of an bicycle robot using gyroscopic sensor
A steps climbing six wheels robot
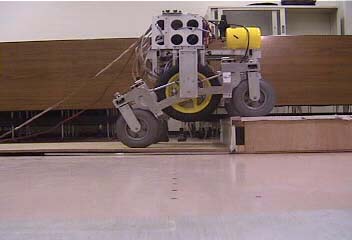
This six wheels robot climb a 16cm step.
Experimental Research on distributed path search and map building by multiple autonomous robot with US sensors

none
Obstacle avoidance using stereovision
The robot is able to navigate, avoiding obstacles with his stereovision system.
Campus sidewalk navigating robot using image color analysis

This robot is able to navigate on sidewalks, using color image analysis
Real time obstacle detection using active vision sensor with vertically emitted laser slit analysis

The robot is able to find obstacles by waving his laser beam from left to right.
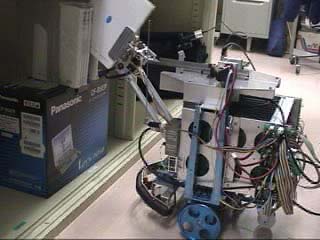
Development of a mobile manipulator

A manipulator with seven degrees of freedom writes on a blackboard.
Remotely controlled service robot for book-reading: No 1. Navigating and picking a book
The robot can take a book from the shelf.
Remotely controlled servic robot for book reading: No 2. Returning a book back

The robot can return back a book in the shelf.
Obstacle Avoidance using several ultrasonic sensors

none